Professors! Need class space or maker space? Contact the Beaver Works Facility Manager
Classes
Beaver Works provides spaces for a range of activities, including classroom-type instruction and hands-on prototyping. A variety of courses, including for-credit classes and non-credit activities during MIT’s Independent Activities Period, can be fulfilled in part or in whole at Beaver Works.


Beaver Works Summer Institute: Project-based classes for high school students nationwide!
BWSI has programs throughout the year in advanced programming and engineering topics, from Saturdays in the Fall and Spring, the Summer Institute in July and our national challenges, we have something for high school students across the country!
Fluidics For Synthetic Biology: Prototyping Microbial Communities (20.S952) – Dr. David S. Kong
In this intensive graduate course, students develop 3D design and fabrication skills and constructed fluidic "artificial guts." Students utilize these structures to culture a variety of gut-based micro-organisms, both in mono- and co-cultures, to prototype and construct from scratch their own microbial communities.

Flight Vehicle Development (16.82) – Jonathan How
A capstone course where students design, prototype, test, and operate a complex atmospheric flight vehicle in a large team environment. The course provides a full lifecycle experience from conceptual design through to a physical hardware system, emphasizing teamwork, communication, and individual responsibility. Students work on real-world projects, often for external contractors, to develop innovative aerospace systems.

Intro to Autonomous Underwater Vehicles (S.201) – Michael Benjamin/Supun Randeni
Students assemble their own autonomous underwater vehicle using a kit of parts, beginning with core electronics and building out a full vehicle for deployment followed by waterproofing vacuum tests, pre-launch sub-system tests, and dockside ballasting, followed by in-water low-level control tuning runs.

Hands On Holography (IAP) – Dr. Robert Freking
This course explores holography and its utility across physics domains. This course consists of fundamental theory coupled with hands-on laboratory sessions. Students create their own computer-generated holograms and a traditional optical hologram to take home.

Engineering Systems Development (2.014) – Dr. Doug Hart
Emphasizes system integration and performance verification. Includes experimental analysis of subsystem performance and comparison with physical models of performance and with design goals.

Open-Source Fluidics for Synthetic Biology (IAP) – Dr. David S. Kong
Students develop proficiency in 3D design and fabrication technologies by constructing fluidic devices for assembling synthetic DNA. Students fabricate multi-input 3D fluidics for mixing DNA and enzyme solutions on-chip, culminating in the assembly of genetic circuits, which are booted up in bacteria and assayed for function.

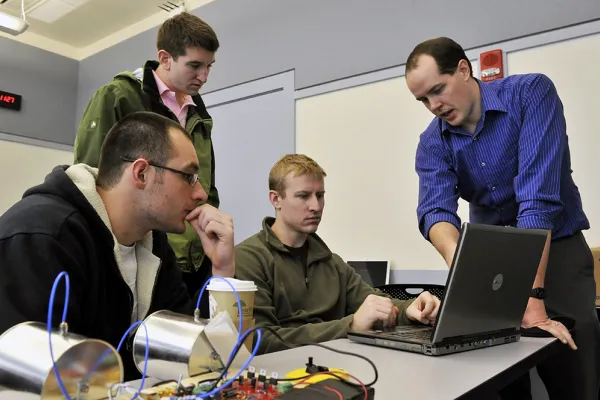
Build a Laser Communication Terminal (IAP) – Dr. David Caplan
Teams apply principles of lasers and optical components, communication link design, and analog and digital modulation to build their own free-space laser communication system.

Engineering Systems Design (2.013) – Dr. Doug Hart
Focuses on the design of engineering systems to satisfy stated performance, stability, and/or control requirements. Culminates in the design of an engineering system, typically a vehicle or other complex system.