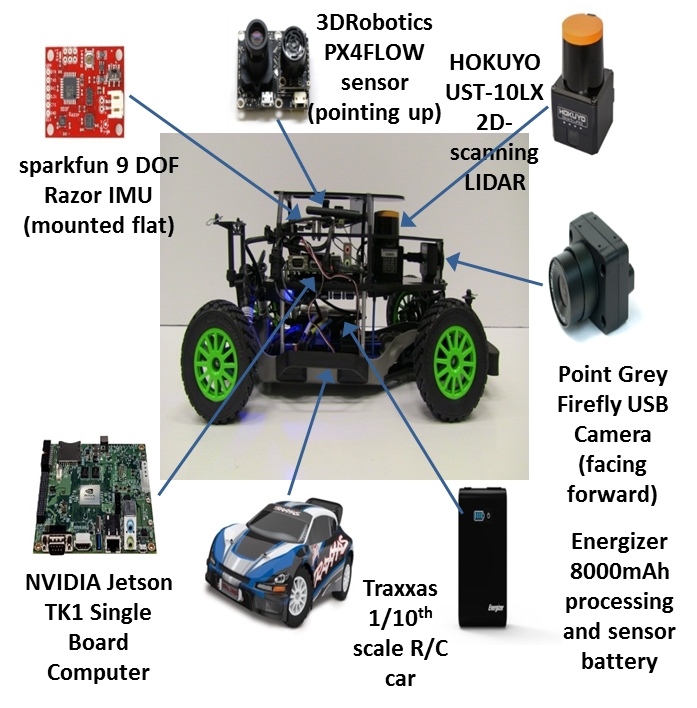
Rapid Autonomous Complex-Environment Competing Ackermann-Steering Robot (RACECAR) 2015
|
Lincoln Laboratory Instructors: MIT Faculty Advisors: |
Michael Park, Michael Boulet, Owen Guldner Sertac Karaman |
 |
|
RACECAR Results:
|
|||
 |
 |
 |
 |
 |
 |
 |
 |
|
Goals for the Participants:
|
 |
|
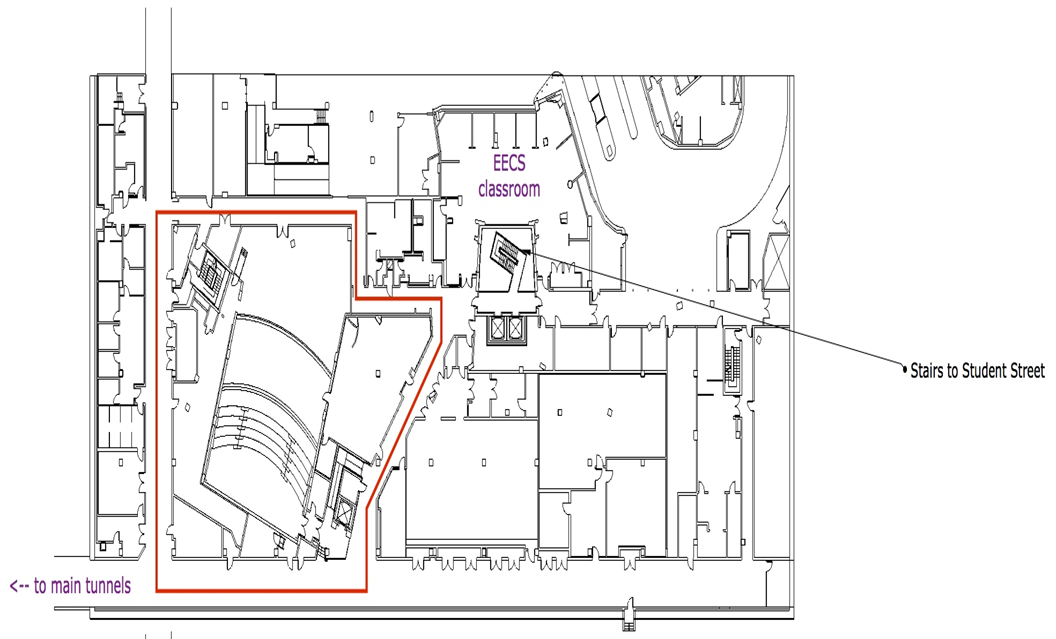 |
RACECAR Course in MIT Strata Center | |
|
Class Structure:
|
 |
|
 |
 |
|
|
RACECAR Future:
|
||
