Autonomy and Robotic Systems Research Projects
Current Projects
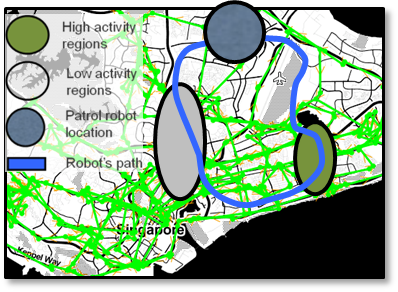
DDAGOUS “Data Driven Autonomy for Group Operations in Uncertain Scenarios” (Jan. 2014 - Jan. 2017)Lincoln Laboratory - Nick Armstrong-Crews This is a collaboration to perform fundamental research in the science of autonomy, with specific focus on decentralized coordination, communication, planning, learning, and control of human/robot teams. |
|
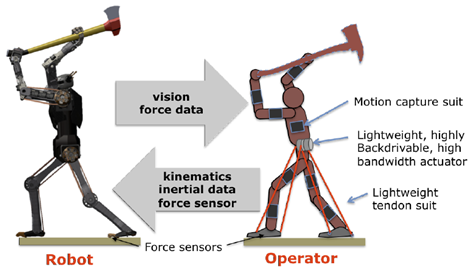
X-Agile (Jan. 2012 - Sept. 2014)Lincoln Laboratory - Nick Armstrong-Crews An agile humanoid robot that can move as quickly and nimbly as a human, with dynamic motions is not yet a reality. The goal of this effort was to create a human-like bipedal robot that can be taught primitive agile motions by a human tele-operator as a step towards fully autonomous agile motions and learning. |
|
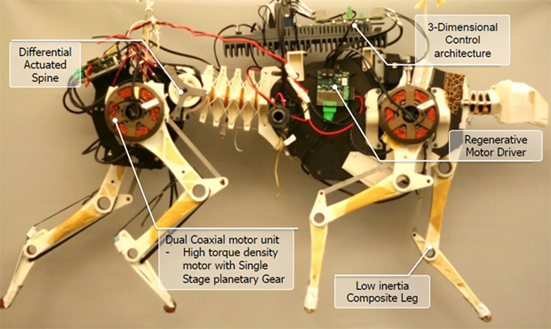
Cheetah (Jan. 2014)Lincoln Laboratory - Phillip Evans This collaboration is designed to take the first cheetah prototype from MIT campus and upgrade the processors and sensor capabilities to increase the agility and maneuverability of this efficient fast platform. This platform is an ideal candidate to explore a layered and hierarchical architecture for robotic and autonomous control systems. The fast motion and feedback necessary for the cheetah motion must happen at a short time scale with low latency, while higher-level perception and motion planning can occur at longer time scales. |
|
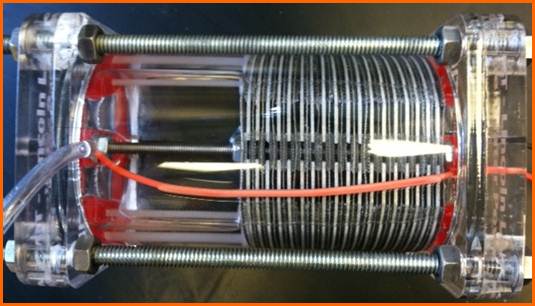
AUV Power Subsystems (Sept. 2011 - May 2014)Lincoln Laboratory - Nicholas Pulsone Increasing the endurance of unmanned underseas vehicles (AUVs) is greatly desired for missions that need to cover the vast expanse of the ocean and lakes. This effort would design and develop a prototype air-independent energy source that increases the endurance of a mid-sized AUV from three days to 30 days and integrate the prototype into a mid-sized AUV for in-water testing. |
|

Past Projects:
Autonomous Forklift (June 2008 - June 2010)Lincoln Laboratory - Mike Boulet MIT Lincoln Laboratory collaborated with the MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) to develop a robotic forklift for military logistics applications. The project, sponsored by the U.S. Army Logistics Innovation Agency, aimed to improve the efficiency of U.S. Army supply operations and reduce the number of human operators exposed to harm in warzone storage facilities. Lincoln Laboratory and MIT tested a robotic forklift as part of a joint project for the U.S. Army. The forklift uses sensors developed for MIT’s entry in the DARPA Urban Challenge. Eventually, the Army plans to employ the autonomous forklifts to haul materials onto robotic trucks. Lincoln Laboratory designed components for the vehicle’s drive-by-wire conversion and developed algorithms for identifying pallets in the environment from 3D “point clouds” produced by the laser range sensors. Once the pallet is identified, additional algorithms locate the pallet slots for forklift tine insertion. Lincoln Laboratory staff also contributed a light detection and ranging (LIDAR) simulator to MIT’s existing simulation environment, enabling closed-loop algorithm testing without powering on the forklift. Researchers demonstrated the autonomous forklift’s capabilities in April 2009. |
|
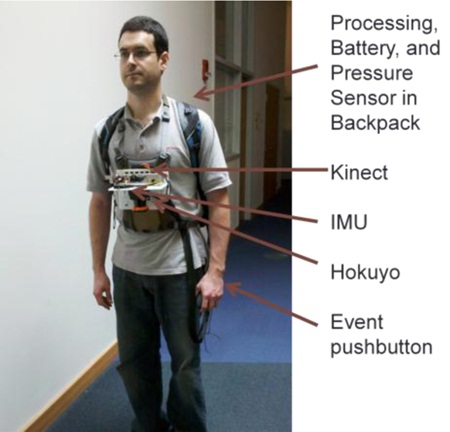
Man-Portable Mapping (Dec. 2010 - Feb. 2012)Lincoln Laboratory - Sean Winkler, Anthony Lapadula The Man-Portable Collaborative Mapping System for GPS-Denied Environments was an Advanced Concepts Committee (ACC)-funded project run as a collaboration with the Computer Science and Artificial Intelligence Laboratory (CSAIL). The team developed a lightweight, LIDAR-based, body-mounted system that successfully mapped long, multi-floor, excursions in complex indoor environments in real time. The development team consisted of Maurice Fallon, Jonathan Brookshire, and Hörður Jóhannsson (CSAIL). |
 |

Potential Future Projects:
Collaborative and Distributed SensingLincoln Laboratory - Nick Armstrong-Crews With the advent of low-cost UAVS and the increase in autonomous flight, many opportunities arise for collaborative and distributed sensing. There are particular challenges to performing such collaboration and distributed sensing in hostile environments. Lincoln Laboratory is actively seeking collaborations to help with collaborative and distributed sensing in environments with limited communication |
 |
SliDARLincoln Laboratory - Structured-light 3D imaging has made an impact on the gaming community with its ability to map the motions onto a 3D model for game interfaces. This collaboration would advance the state of the art in 3D sensing using a variation of the structured light/active stereo technique, with application to a variety of robotic perception tasks and operational scenarios (e.g., obstacle avoidance for low-altitude flight). |
 |
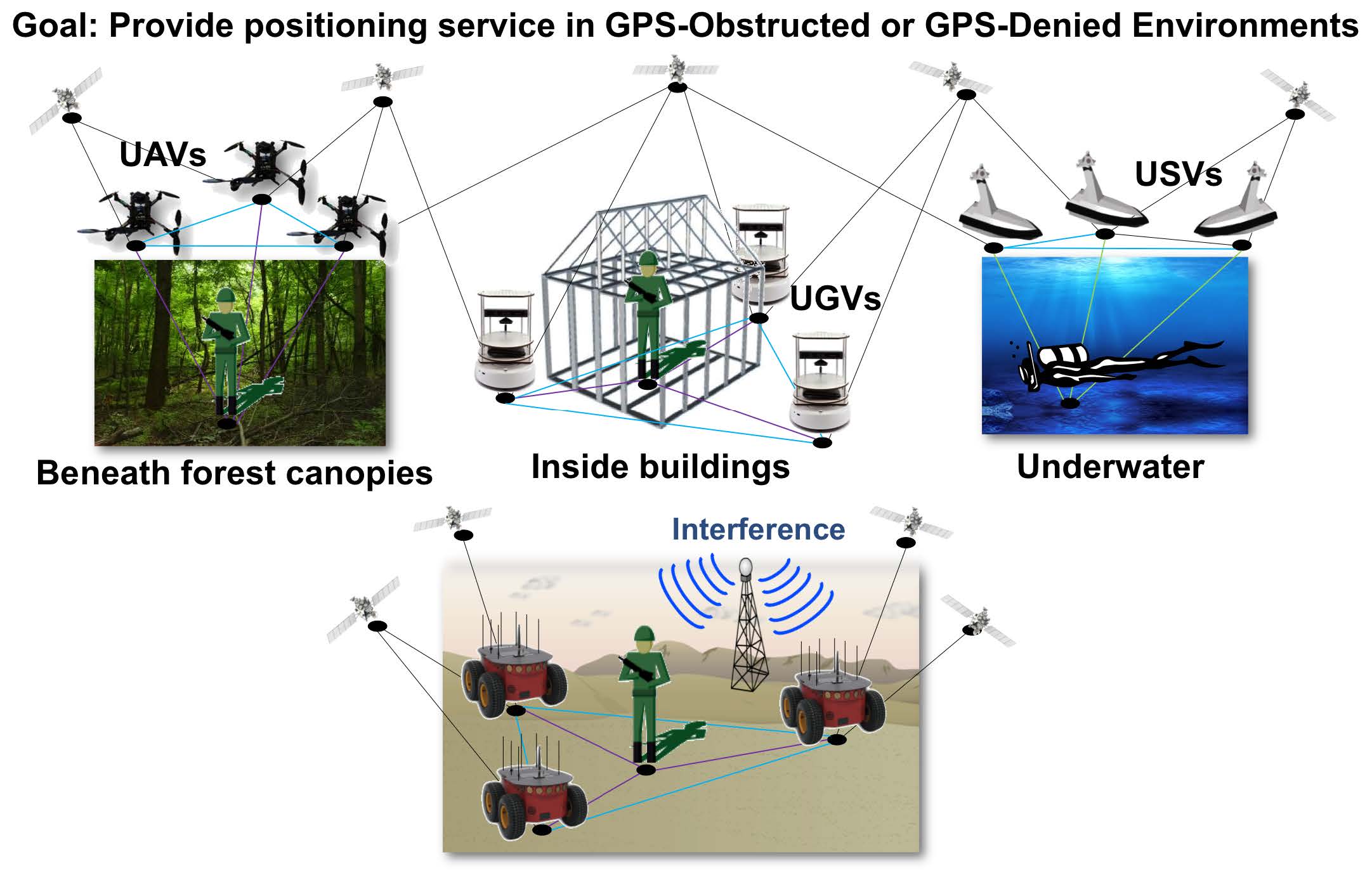
Generalized Positioning in GPS-Denied EnvironmentsLincoln Laboratory - Nick Armstrong-Crews Localization and mapping are key foundations for situational awareness and decision making for autonomous systems. Collaboration is desired to create a generalized framework and technology suite to better perform mapping and localization by borrowing graph-theoretic concepts from distributed communications networks (distributed, heterogeneous links, multi-hop, mesh networking) – a.k.a., “the Internet of positioning services.” |
 |
Ground-Penetrating Radar (GPR) for Navigation and MappingLincoln Laboratory - Byron Stanley MIT Lincoln Laboratory has developed a novel localizing ground-penetrating Radar (LGPR) system that can map and then localize autonomous vehicles on highways and off-road terrain at speeds up to 60 mph with centimeter-level accuracy. Lincoln Laboratory seeks collaboration to allow multi-vehicle mapping and localization/navigation using LGPR for improved robustness of current localization methods, and for environments with poor visibility, GPS denied operation, or other conditions that limit traditional forms of localization. |
 |
