Autonomy and Robotic Systems Capstone Projects
Current Projects
 |
MobileTactical Power SystemsFall 2014 – Spring 2015 |
 |
Enviromental Awareness In the Maritime DomainFall 2014 – Spring 2015 |
 |
Enviromental Awareness In the Maritime DomainFall 2014 – Spring 2015 |
Past Capstone Projects
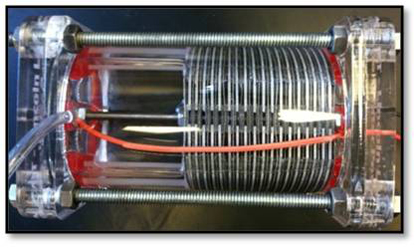  |
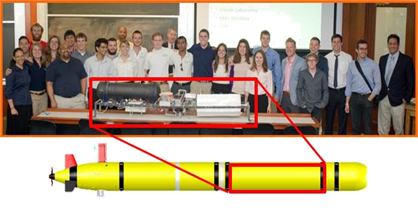
AUV Power Subsystems 2014Course 2.013/2.014 - Professor Doug Hart For the past several years, the objectives of the Engineering Systems Design (2.013) and Engineering Systems Development (2.014) courses are to design, fabricate and test a long-endurance energy source for undersea systems. Specific design goals include air-independent and safe, reliable power that is able to increase the endurance of a mid-sized AUV from 3 days to 30 days. The class of 2014 developed a full-scale prototype energy source that uses a commercial fuel cell that is powered by the hydrogen gas released when aluminum reacts with water.
|
|
 |
AUV Power Subsystem 2013 Fall 2012 – Spring 2013 |
|
 |
AUV Power Subsystem 2012 Fall 2011 – Spring 2012 |
