Capstone Projects
Capstone Projects are at the heart of the Beaver Works experience. A typical two-semester capstone project allows students to work collaboratively to carry ideas from initial design all the way through prototype fabrication and testing.
Current Projects
Coming soon!
Past Projects
 |
MobileTactical Power SystemsFall 2014 – Spring 2015 |
 |
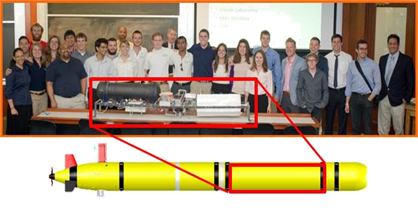
Enviromental Awareness In the Maritime DomainFall 2014 – Spring 2015 |
 |
Enviromental Awareness In the Maritime DomainFall 2014 – Spring 2015 |
 |
Enviromental Awareness In the Maritime DomainFall 2014 – Spring 2015 |
 |
Cyber Defense Fall 2014 – Spring 2015 |
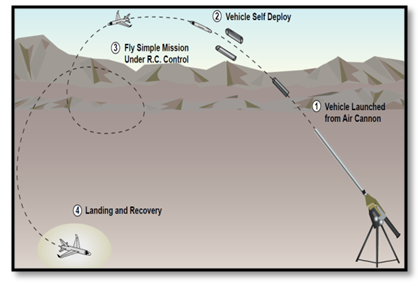 |
Deployable mini-UAV Project Spring 2015 |
 |
Novel UAV Development Fall 2014 – Spring 2015 |
 |
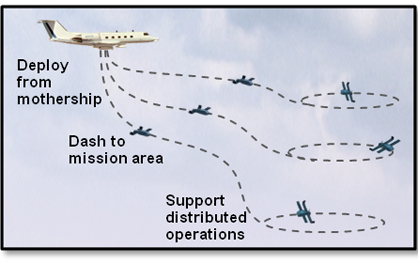
Robust Communications for Autonomous SwarmsFall 2015 |
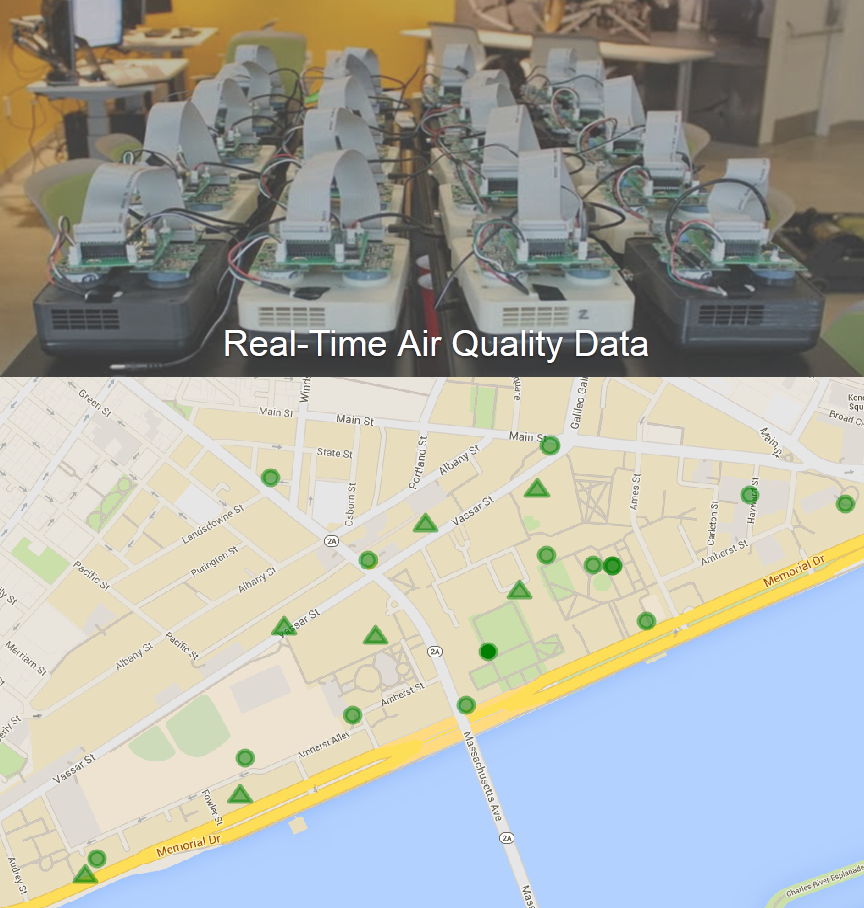 |
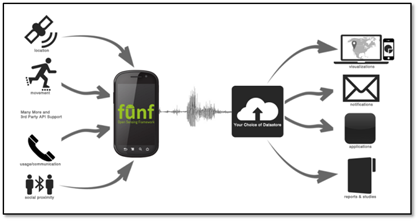
Sensor Networks and the Smart Campus Course 1.S992/1.013 – Professors Colette Heald and Jesse Kroll |
|
Sensor Networks and the Smart CampusCourse 1.S992/1.013 – Professors Colette Heald and Jesse Kroll |
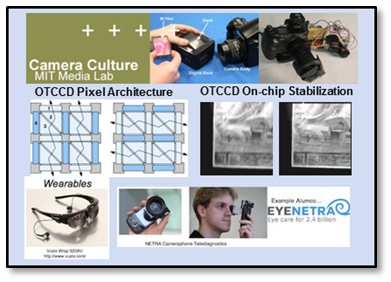 |
Imaging and Fab VenturesCourse MAS.533 - 3 - Professor Ramesh Raskar |
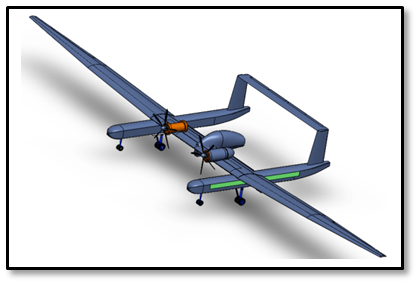
UAV Humanitarian Assistance and Disaster Relief (HADR) MissionsCourse 16.82/16.885 - Professors Sertac Karaman and Mark Drela
Design an unmanned aerial vehicle (UAV) to support rapid-response material delivery in HADR missions. The UAV should be designed to be launched from medium-size ships, and carry expandable payloads of varying weights. The UAV should be able to provide reasonable requirements on range, response time, and payload drop accuracy, suitable for HADR operations. Furthermore, the design must allow (relatively) low cost construction such that the UAVs can be deployed in large numbers. |
|
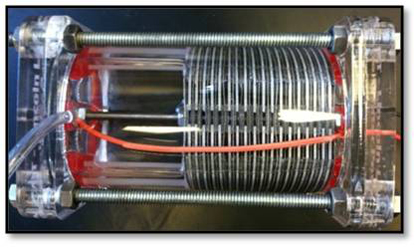 |
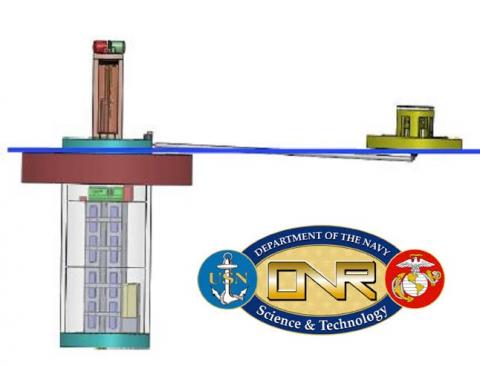
AUV Power Subsystems 2014Course 2.013/2.014 - Professor Doug Hart |
 |
Flexible Aircraft System Testbed (FAST) Fall 2012 – Spring 2013 |
 |
AUV Power Subsystem 2013 Fall 2012 – Spring 2013 |
 |
Media Lab Course Spring 2012 |
 |
Large UAV Design Course Spring 2012 |
 |
Deployable mini-UAV Course Spring 2012 |
 |
AUV Power Subsystem 2012 Fall 2011 – Spring 2012 |
 |
Project Perdix Fall 2010 – Spring 2011 |
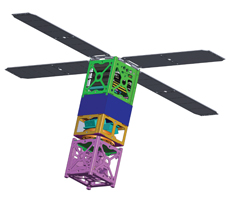 |
Project MicroMASFall 2010 – Spring 2011
|
 |
Project Icarus Fall 2009 – Spring 2010 |
