Persistent Autonomous UAV System Development
| The demand for information and situational awareness both on and off the battlefield has led to increased military utilization of UAVs as sensor platforms for surveillance and communications. From 1995 to 2010, the iconic MQ-1 Predator flew more than 405,000 flight hours with the majority taking place over combat areas. Similarly, in its first seven years of military service, the RQ-4 Global Hawk logged over 17,000 combat flight hours, providing high resolution intelligence, surveillance, and reconnaissance data that formed a large component of the targeting imagery for strike mission support during Operation Iraqi Freedom. In addition to military applications, UAV systems are also being used in civil applications such as border patrol and environmental. | 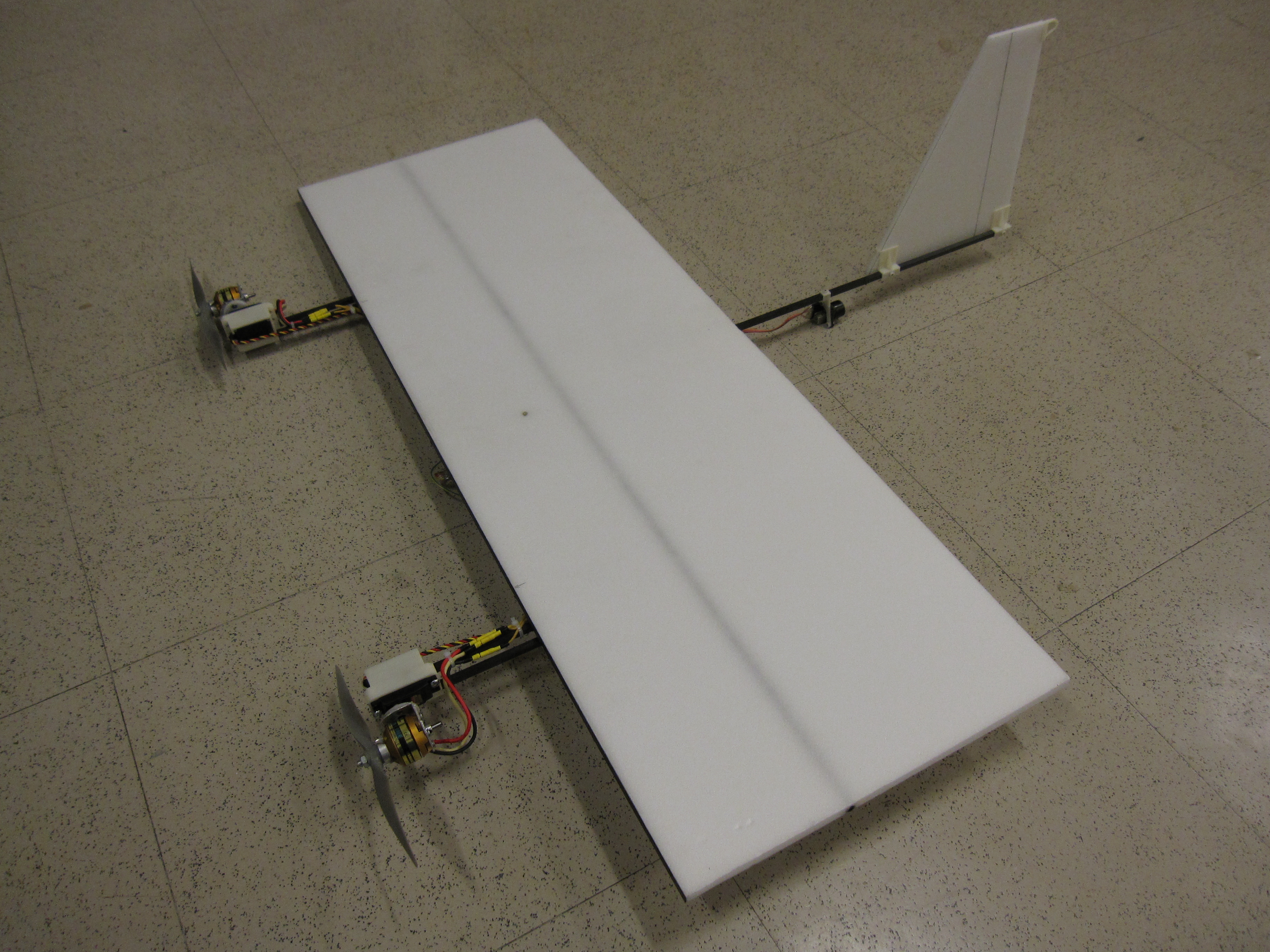 |
||
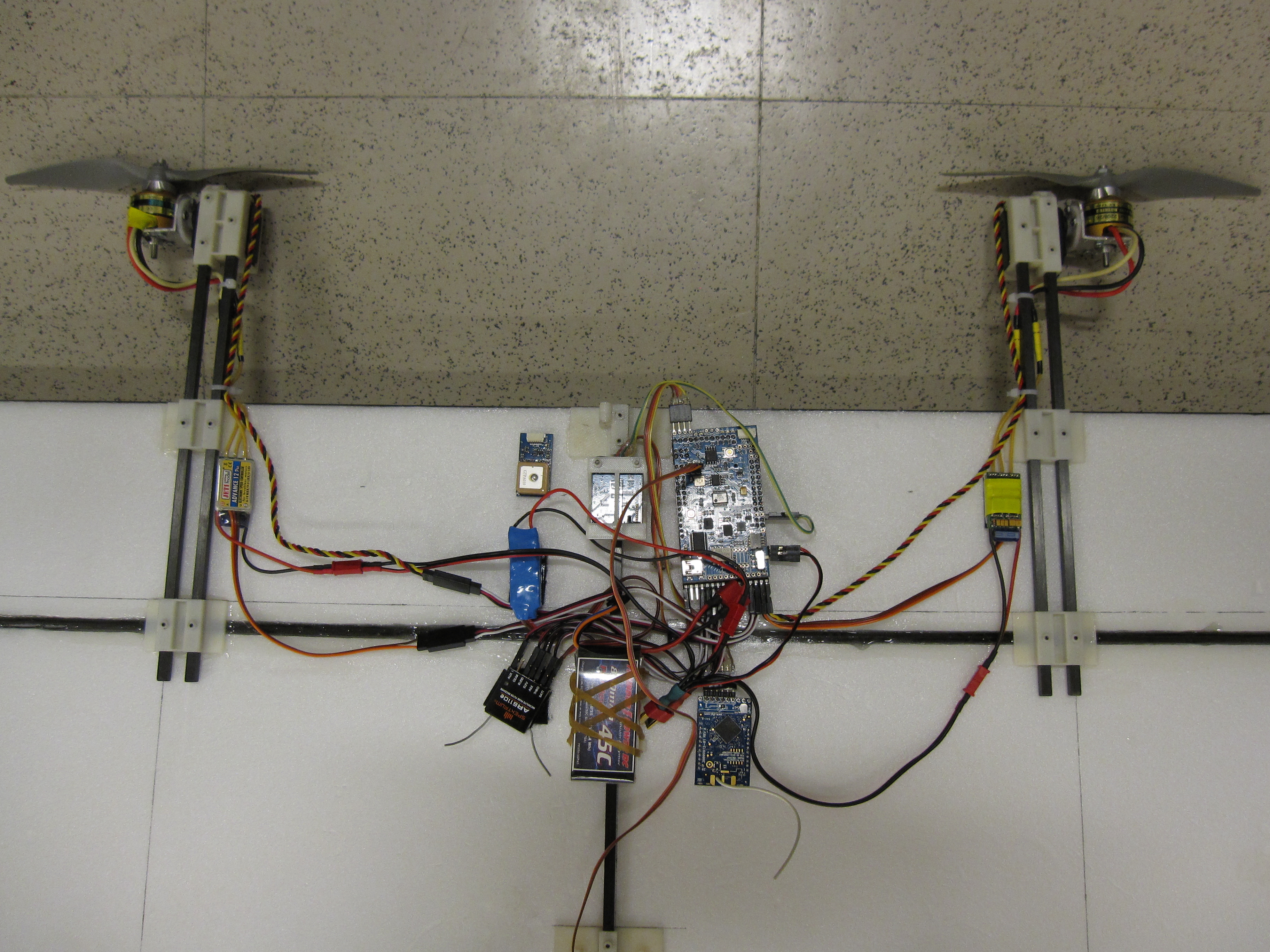 |
Extended mission times will greatly expand the utility of small UAVs that are currently limited to a single flight lasting no more than a few hours. This thesis assesses the challenges to developing a small, long endurance UAV and presents a preliminary vehicle and controller design for a tiltrotor UAV that achieves long endurance opera- tion by combining a low power mode with energy harvesting and autonomous takeoff and landing capabilities. Mass and power models are developed for the vehicle configuration to provide mission performance and sizing analysis. Results indicate that a feasible design exists that is capable of achieving multiple, successive flight with continuous flight from one hour after sunrise to one hour before sunset. Based on the sizing results, a prototype tiltrotor vehicle is built with on-board sensing and control to demonstrate the required takeoff control capabilities. | ||
| The vehicle control architecture is established as a composition of locally valid feedback controllers. A nonlinear, quaternion based model and simulation are devel- oped for the vehicle dynamics and used in the controller design process. A nested PID linear feedback controller is implemented for the hover controller and attitude and altitude hovering control are demonstrated on the prototype vehicle. Dynamic inversion is used to cancel nonlinearities in the vehicle takeoff dynamics and a linear controller is implemented on the linearized dynamics with pitch rate tracking. Discontinuous control inputs during the transition between takeoff and hover controller modes are shown to result in undesirable transient behaviors that are mitigated by a switching design that determines when the control transfer occurs and through smoothing of the input signal. | 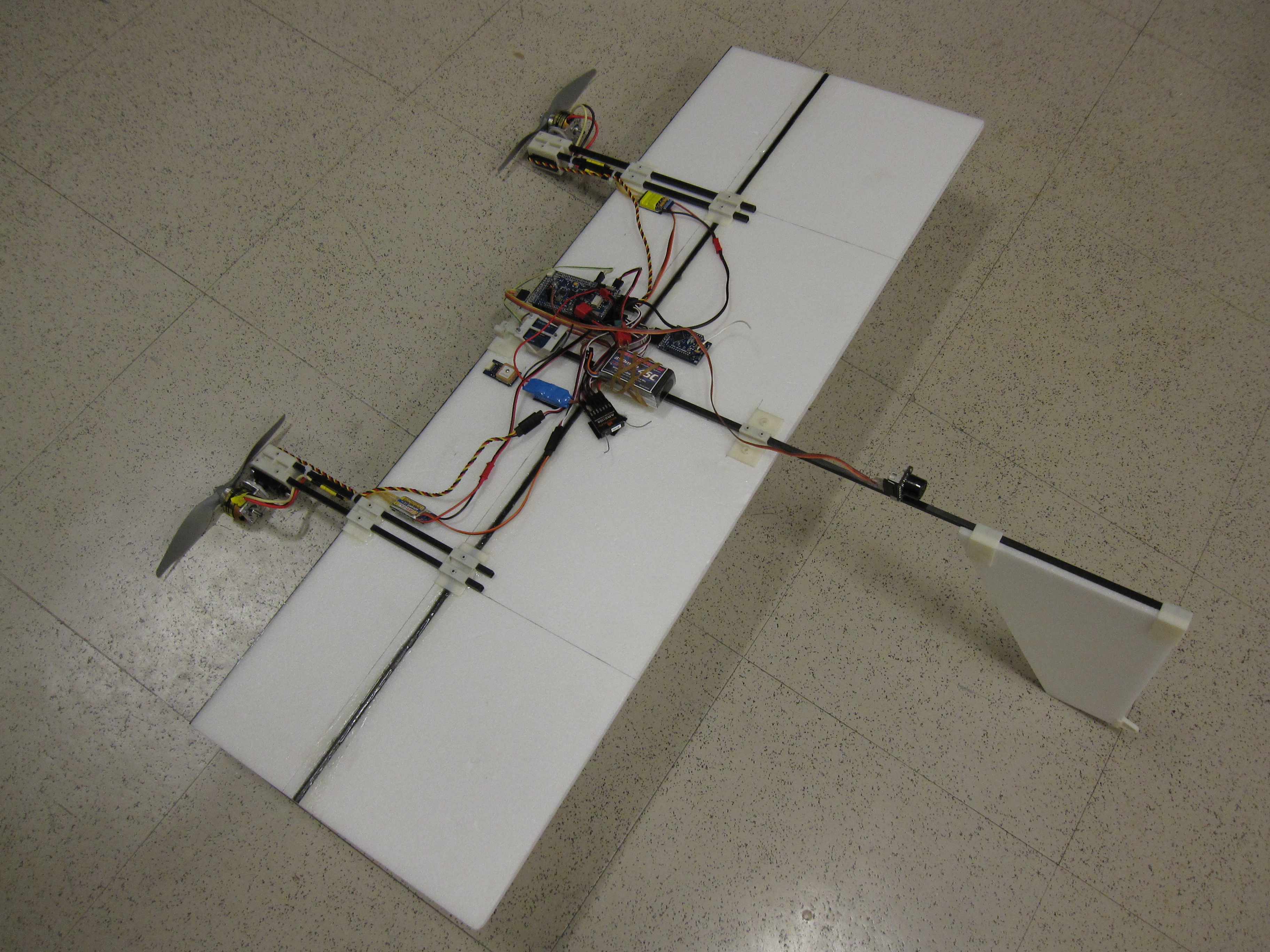 |
||
