UAV Research Projects
The Beaver Works Unmanned Aerial Systems Center has a robust set of joint research projects in collaboration with the Departments of Aeronautics and Astronautics, Electrical Engineering and Computer Science, and Computer Science and Artificial Intelligence Laboratory (CSAIL). These projects challenge students to design, fabricate, test, and fly new systems that push the boundaries of unmanned vehicles and missions.
Current Projects
Query-Driven Scouts (June 2012 - Jan. 2015)Lincoln Laboratory - Kevin Cohen Working with Eric Timmons and James Paterson on developing a framework and test bed for investigating advanced options to dynamically control multiple unmanned vehicles for surveillance missions. The simulation environment allows control of multiple unmanned aerial vehicles as they execute search patterns. |
|
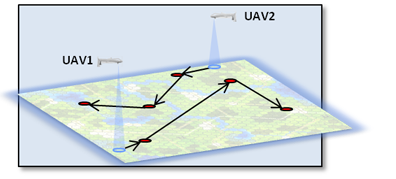
Robust Communication and Control (Jan. 2013 - Jan. 2015)Lincoln Laboratory - Tim Gallagher Working with Stephanie Gill and Swarun Kumar in exploring advanced dynamic protocols and navigation algorithms to maintain coordination between multiple vehicles operating in uncertain environments. Developed a communication and control framework to position a team of UAV routers to satisfy the communication requirements of the mission taken by independent client robots. The controller is centralized and hence requires full connectivity of the network. |
|
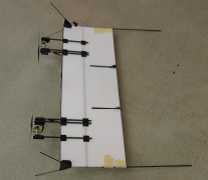
Scalable Aircraft Design and Manufacturing (Nov. 2013 - Oct. 2014)Lincoln Laboratory - Kevin Cohen Tony Tao and Libby Jones are exploring flexible aircraft design, developing an architecture to reduce development time and cost through common tooling, interconnects, and broad-range performance estimates. Exploring innovative technologies for improved aerodynamic, propulsion, manufacturability, and modularity. |
|
National Airspace Integration (Sept. 2013 - May 2014)Lincoln Laboratory - Jim Kuchar Kip Johnson is working on developing more comprehensive safety control architectures leveraging human-centered design for incremental integration of unmanned systems into the national airspace. The use of STAMP, STPA, and development of systems-theoretic human-automation safety ontologies will provide a more complete analytical framework to safely develop and operate this complex integrated system. |
|
|
|
|
Past Projects |
|
Persistent Autonomous UAV System Development (2010 - 2011)Lincoln Laboratory - Kevin Cohen The goal of Josiah’s research was to design, build, and test a novel unmanned aerial vehicle design to capable of persistent autonomous operations. Objectives included takeoff and recovery from diverse terrain, sufficient wing area for continuous daytime flight with solar cells, robustness to environmental perturbations such as wind gusts, man-portable vehicle, all with minimal ground infrastructure. |
|