BWSI Course - Autonomous RACECAR Grand Prix
|
Program Overview
Driverless vehicle technology has been growing at an exponential pace since the DARPA Grand and Urban Challenges pushed the state of the art to demonstrate what was already possible. Commercial interest and aggressive development are being driven by Google, Toyota, Tesla, Continental, Uber, Apple, NVidia, and many other companies. There is no single technology or “killer app” available to solve the myriad perception, understanding, localization, planning, and control problems required to achieve robust navigation in highly variable, extremely complex and dynamically changing environments. This summer, Beaver Works Summer Institute will offer nine teams of five students, each with its own MIT-designed RACECAR (Rapid Autonomous Complex Environment Competing Ackermann steeRing) robot, the opportunity to explore the broad spectrum of research in these areas, learn to collaborate, and demonstrate fast, autonomous navigation in a Mini Grand Prix to Move... Explore... Learn...Race!
This program consists of two components: an online course from January to May open to all interested students and a four-week summer program at MIT from July 11 to August 7 in 2022 for a select group of students. The online component gives students a background in the basic concepts and tools that will be used during the summer program. Students will use a simulation in Unity to test their code and algorithms on virtual racetrack.
Completing the online curriculum will prepare students to cover the topics of Control Systems, Computer Vision, Localization, Planning, and Navigation at a more advanced level in the summer. The physical RACECAR is capable of achieving speeds of 20 mph, utilizing data from real sensors processed with an onboard NVidia Nano embedded computer. Such a demonstration of safe, robust autonomous navigation is a significant challenge. A team of experienced MIT researchers will provide the lectures each day, covering material that reviews autonomy fundamentals and expanding on advanced topic areas in the lecturers’ expertise. A series of graduated exercises, hands-on labs, and weekly challenge demonstrations will be provided to lead students through the process of developing their solutions to the fundamental problems. In addition, guest lecturers from among leading researchers in the computer science, engineering, and autonomous vehicle academic and corporate communities will provide students with insight into emerging trends in these fields.
Online Course
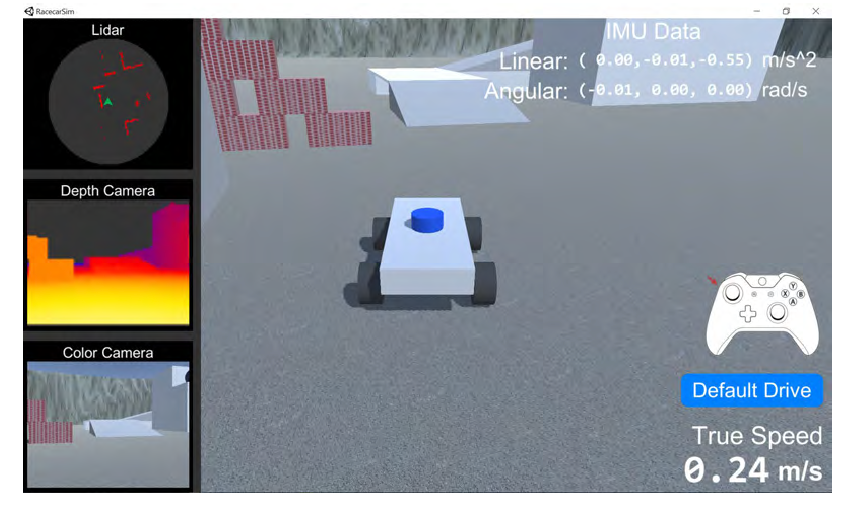
RACECAR model navigating Unity simulation with synthetic sensor data. Introduction and Prerequisites
Autonomous Vehicles
Summer Course The four-week summer program uses the additional online material that prepares students to begin the summer course at a more advanced level. The curriculum is being expanded this year to emphasize the use of computer vision and machine learning techniques in autonomous navigation inside a Unity simulation.
Each day in the course will consist of a mix of lectures and hands-on projects to reinforce and apply the material. The detailed topics for each week are listed below: Week 1: Move…
Week 2: Explore…
Week 3: Learn…
Week 4: Race! The final race is usually held in the MIT Johnson Ice Rink so instead this year, we will be sending students specifications for course elements and will also be looking for videos of what can do with the autonomous car that they've programmed. A wide variety of challenges will require that a range of behaviors be implemented to allow the vehicle to make high-level decisions based on visual perception in order to complete a circuit of the track. |
 The online component for the Autonomous RACECAR course contains important introductory material to provide students with the background required to successfully complete the four-week summer course. A virtual machine image is provided for students to download and use on their own computers, with necessary tools preinstalled, so that they can work through both the introductory and more advanced topics and explore problems specific to autonomous vehicles.
The online component for the Autonomous RACECAR course contains important introductory material to provide students with the background required to successfully complete the four-week summer course. A virtual machine image is provided for students to download and use on their own computers, with necessary tools preinstalled, so that they can work through both the introductory and more advanced topics and explore problems specific to autonomous vehicles.