UAV Capstone Projects
The Beaver Works Unmanned Aerial Systems Center has a robust set of capstone projects in collaboration with MIT’s Department of Aeronautics and Astronautics. These projects challenge students to design, fabricate, test, and fly new systems that push the boundaries of unmanned flight.
Current Projects
 |
Enviromental Awareness In the Maritime DomainFall 2014 – Spring 2015 |
 |
Enviromental Awareness In the Maritime DomainFall 2014 – Spring 2015 |
Upcoming Capstone Projects
 |
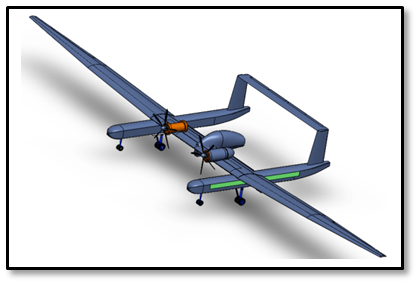
Novel UAV Development Fall 2014 – Spring 2015 |
 |
Deployable mini-UAV Project Spring 2015 |
 |
Robust Communications for Autonomous Swarms Fall 2015 Presents concepts, principles, and algorithms of swarm behaviors of various biological systems and applies them to mechanical systems in the physical world. Options for communicating among nodes in a swarm are presented as well as the advantages of multiple antenna systems.
|
Past Capstone Projects
UAV Humanitarian Assistance and Disaster Relief (HADR) MissionsCourse 16.82/16.885 - Professors Sertac Karaman and Mark Drela
Design an unmanned aerial vehicle (UAV) to support rapid-response material delivery in HADR missions. The UAV should be designed to be launched from medium-size ships and carry expandable payloads of varying weights. The UAV should be able to provide reasonable requirements on range, response time, and payload drop accuracy, suitable for HADR operations. Furthermore, the design must allow (relatively) low-cost construction such that the UAVs can be deployed in large numbers. |
|
 |
Flexible Aircraft System Testbed (FAST) Fall 2012 – Spring 2013 |
 |
Large UAV Design Course Spring 2012 |
 |
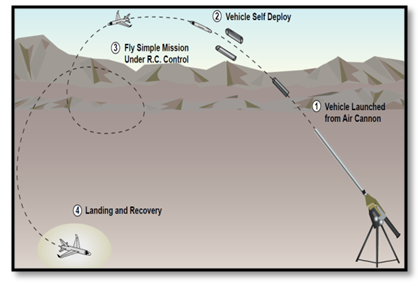
Deployable mini-UAV Course Spring 2012 |
 |
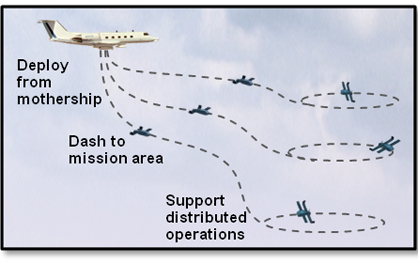
Project Perdix Fall 2010 – Spring 2011 |
 |
Project Icarus Fall 2009 – Spring 2010 |
